Programmation de la table traçante¶

- Auteur
Gilles Lecorsier
- Blog
- Association
BricoLab Groslay(95)
- Entity
- Page principale
- Date de création
18/10/2025
- Date dernière maj
20/12/2025
Présentation¶
Le traceur utilise une version modifié de GRBL-Servo 4 et fonctionne avec UGS 5 (Universal G-Code Sender).
Installation¶
Installation de Grbl_Pen_Servo¶
Les étapes suivantes permettent d’installer une version coreXY (2 axes) de GRBL sur l’Arduino. - Méthode
Téléchargez le fichier « Grbl_Pen_S ervo-master.zip » sur le site GRBL-SERVO 4.
Décompressez le fichier.zip.
Localisez le dossier C:DatafablabCroquisArduinolibraries (exemple) et copier votre dossier « grbl ». Attention !! PLusieurs GRBL différents ne peuvent cohabiter dans le même IDE Arduino.
Installation de Universal Gcode Sender¶
Universal Gcode Sender (UGS 5) est une plate-forme de gcode entièrement fonctionnelle permettant l’intégration avec des contrôleurs CNC sophistiqués tels que GRBL.
Télécharger le fichier .zip et le décompresser à l’endroit que vous souhaitez. Localiser l’executable dans le dossier bin.
Execution d’UGS¶
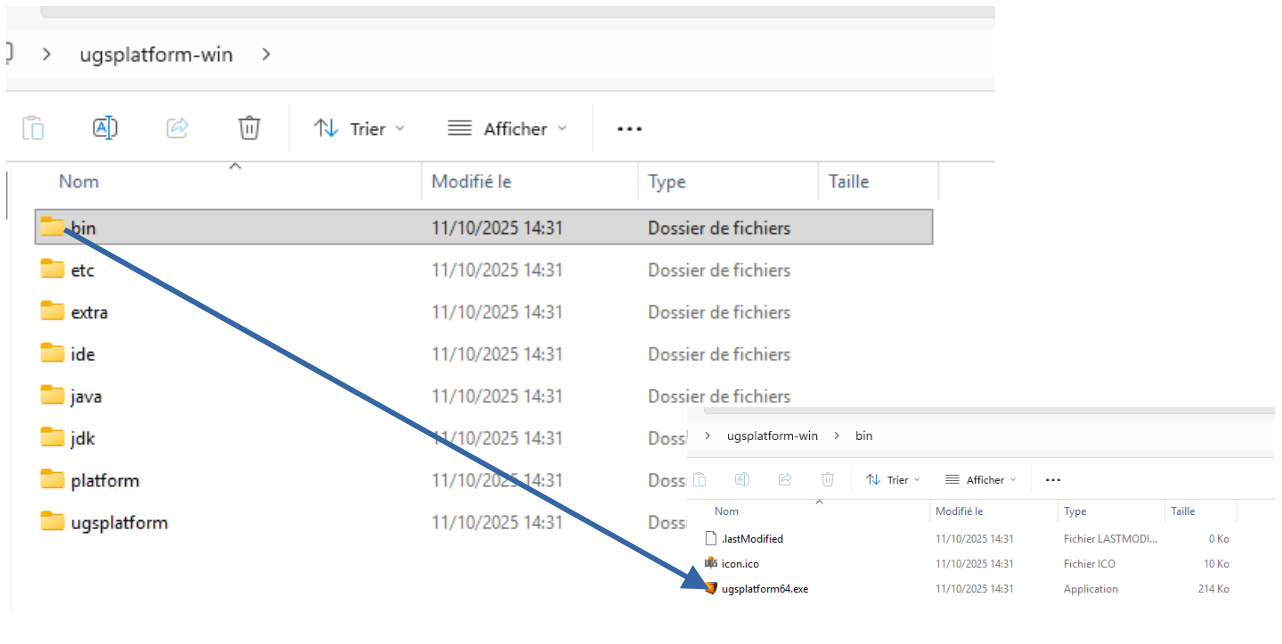
Double clique sur ugs-platform-app-win > ugsplatform-win > bin > ugsplatform64.exe
Connection

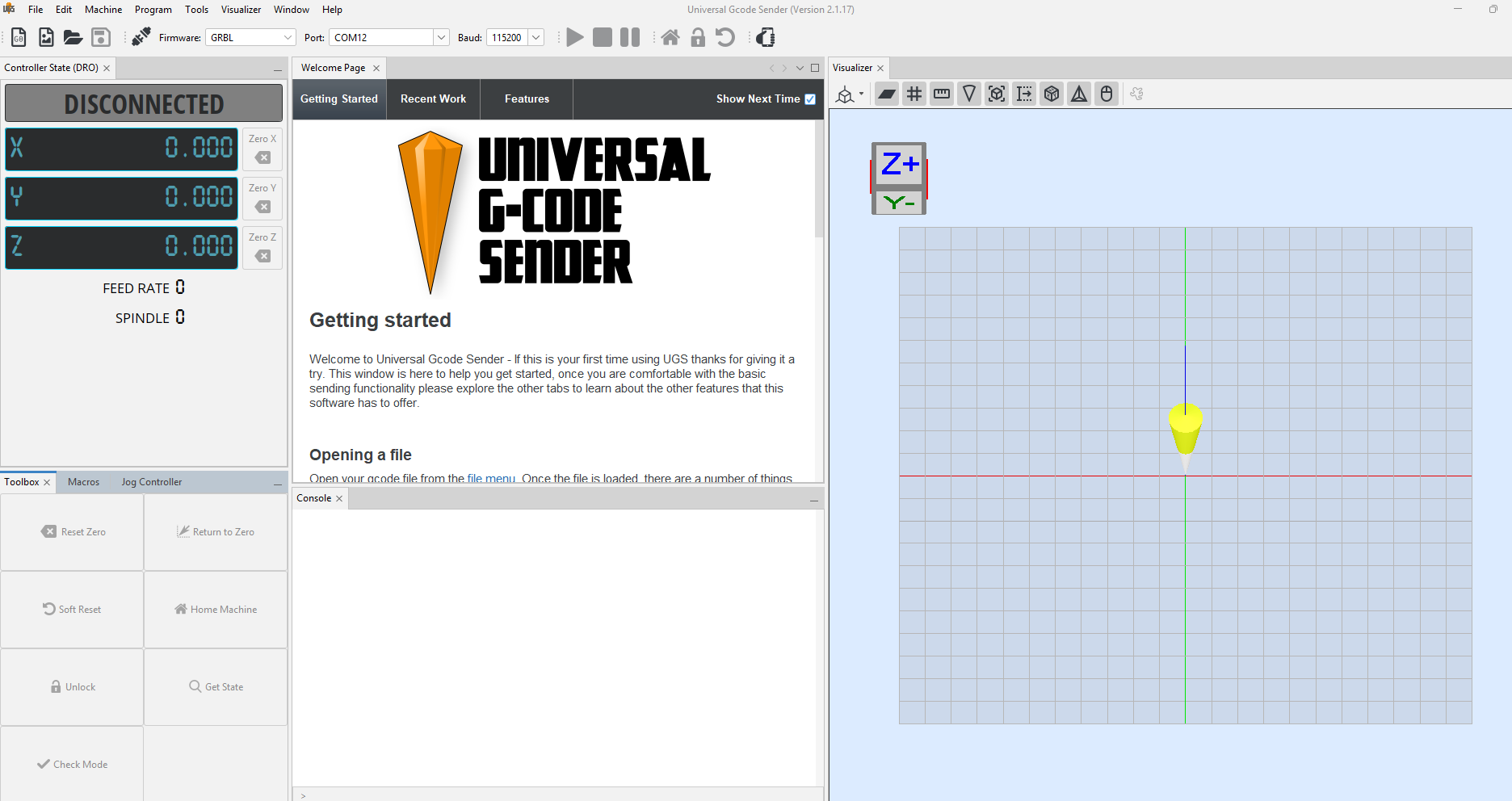
Cliquer sur l’icone « Connect or Disconnect »
Votre table traçante doit alors être connectée et vous pouvez vérifier son état actuel. Si vous voyez un état « IDLE » ou « ALARM », votre table traçante est correctement connectée et vous êtes prêt à partir.
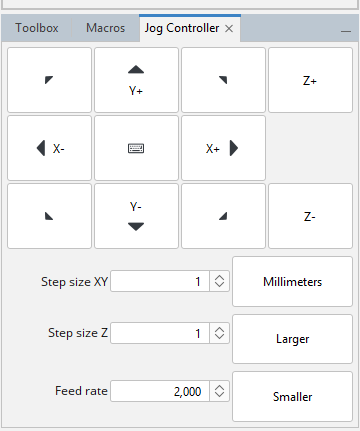
Tester chaque axe de votre table traçante en déplaçant chaque axe d’avant en arrière afin de vous assurez qu’elle réponde comme prévu.
Vous pouzez définir le zéro machine (Reset zero), mettre à zéro le soft (Soft Reset), le retour machine (eturn to Zero)
